Introduction:
In agricultural robotics, path planning, and navigation algorithms enable autonomous harvesting systems to navigate complex fields and complete their tasks efficiently. These algorithms, designed to mimic human-like decision-making processes, allow robots to plan optimal paths, avoid obstacles, and precisely reach their targets. By harnessing the power of these algorithms, the future of autonomous harvesting is being shaped, promising increased efficiency, productivity, and accuracy in the agricultural industry.
Overview of Autonomous Harvesting: Introducing the Need for Path Planning and Navigation Algorithms
Autonomous harvesting platforms are large-scale robotic systems that revolutionize harvesting fruits and vegetables. Equipped with computer vision, machine learning, and automated manipulation capabilities, they can identify, locate, and harvest a wide range of crops efficiently and precisely. These platforms integrate multiple robots and advanced technologies to automate the harvesting process in agricultural fields.
The autonomous harvesting platforms are designed to adapt to different crop types and farm configurations, making them versatile and scalable for large-scale operations. They utilize sophisticated algorithms to assess the ripeness and quality of the products, ensuring optimal harvesting timing. These platforms can be customized with specific harvesting tools and modules based on crop requirements.
With the ability to operate autonomously, these platforms navigate through fields, avoiding obstacles and adapting to changing terrain. They can work day and night, optimizing the harvesting process and reducing the dependency on manual labor. Additionally, the data collected during harvesting can be used for yield analysis, crop management, and farm optimization.
Implementing autonomous harvesting platforms offers numerous benefits, including increased efficiency, reduced labor costs, minimized crop damage, and improved farm productivity. These platforms contribute to sustainable and resource-efficient agricultural practices by streamlining harvesting. Their integration into modern farming operations holds great potential for enhancing productivity, profitability, and sustainability in the agriculture industry.
Understanding Path Planning: The Key to Efficient and Accurate Autonomous Harvesting
Path planning and navigation algorithms are essential components of autonomous harvesting platforms. These algorithms enable the robots to determine the optimal path and navigate the agricultural field to reach the target crops efficiently. They consider various factors such as obstacles, field boundaries, and the location of the crops.
There are several path planning and navigation algorithms used in autonomous harvesting platforms, including:
- A* Algorithm: This algorithm uses a heuristic search to determine the shortest route between two points. It considers the cost of moving from one point to another and estimates the remaining distance to the target location.
- Dijkstra’s Algorithm: This algorithm calculates the shortest path from a starting point to all other topics in the field. It iteratively selects the node with the minimum cost and updates the cost of reaching its neighbors.
- Potential Fields Algorithm: This algorithm models the field as a potential energy field, where obstacles and target crops generate attractive and repulsive forces. The robot navigates by following the gradient of the potential field to avoid obstacles and reach the target crops.
- Rapidly Exploring Random Tree (RRT) Algorithm: This algorithm is widely used in robotics for path planning in complex and dynamic environments. It generates a tree of random samples in the configuration space and explores it to find a viable path to the target crops.
These algorithms often combine real-time sensor data and localization techniques to adapt to changing field conditions and ensure accurate navigation and path planning for efficient harvesting.
Exploring Navigation Algorithms: A Deep Dive into A*, Dijkstra’s, Potential Fields, and RRT
A* algorithm:
The A* or A-star algorithm is a popular path-planning algorithm used in robotics and autonomous systems. It is widely used for finding the shortest path between two points while considering both the cost of movement and the estimated cost to reach the goal.
The A* algorithm combines the advantages of Dijkstra’s algorithm (which guarantees finding the shortest path) and heuristic search algorithms (which make informed decisions based on estimated costs). It uses a heuristic function, typically based on the Euclidean or Manhattan distance, to estimate the cost from the current position to the goal.
The algorithm maintains two sets of nodes: the open set and the closed set. It starts from the initial position and expands the search by evaluating neighboring nodes, considering their cost and heuristic values. The algorithm selects the node with the lowest combined cost, the f-score, and adds it to the closed set. It then examines the neighbors of the selected node and updates their costs and parent pointers to see if a better path is found.
The A* algorithm continues this process until it reaches the goal node or exhausts all possible paths. It guarantees finding the shortest route if conditions are met, such as consistent and admissible heuristic estimates.
In autonomous harvesting platforms, the A* algorithm can be used to plan the optimal path for the robot to navigate through the crop field, avoiding obstacles and optimizing efficiency. By considering both the cost of movement and the estimated cost to reach the goal, the A* algorithm enables robots to navigate complex environments and efficiently perform harvesting tasks autonomously.
Dijkstra’s algorithm:
Dijkstra’s algorithm is a popular and widely used algorithm for finding the shortest path in a graph. It is commonly applied in robotics and autonomous systems for path planning and navigation tasks.
The algorithm maintains a set of nodes, initially containing only the start node and assigning tentative distances to all other nodes. It iteratively selects the node with the most petite undetermined length and updates the spaces of its neighboring nodes. This process continues until the algorithm reaches the goal node or all nodes have been visited.
Dijkstra’s algorithm will always discover the shortest path if all edge weights are non-negative. It explores the graph breadth-first manner, considering all possible directions and gradually updating the shortest distances.
The algorithm chooses the node with the shortest tentative distance throughout each iteration and looks at its nearby nodes. It calculates the distance from the start node to each neighbor through the current node and compares it with their undetermined spaces. If a shorter path is found, the tentative distance is updated.
Dijkstra’s algorithm efficiently searches the network and discovers the shortest path from each reachable node to the start node by continually selecting the nodes with the smallest tentative distance. It is commonly used in autonomous systems to plan optimal courses, such as navigating a robot through a complex environment, avoiding obstacles, and reaching a target location.
In autonomous harvesting platforms, Dijkstra’s algorithm can plan efficient paths for robots to navigate through fields, orchards, or vineyards, ensuring they reach their harvesting targets while minimizing travel distance and time.
Potential Fields Algorithm:
The Potential Fields Algorithm is commonly used in robotics for path planning and navigation tasks. It is based on simulating attractive and repulsive forces to guide a robot towards its goal while avoiding obstacles.
The algorithm defines attractive forces towards the goal location and repulsive forces from environmental obstacles. These forces are modeled as vectors that act on the robot’s position. The resulting force vector determines the direction and magnitude of the robot’s movement.
Attractive forces pull the robot towards the goal, encouraging it to move in that direction. Repulsive forces, on the other hand, push the robot away from obstacles, preventing it from colliding with them.
The robot’s proximity to the object or obstacle affects the attractive and repulsive forces’ intensity. The closer the robot is to the destination, the stronger the attractive force. Similarly, the closer the robot is to a block, the stronger the repulsive force.
A resultant force vector is obtained by summing the attractive and repulsive forces acting on the robot. The robot then adjusts its motion according to this force, moving towards the goal while avoiding obstacles.
The Potential Fields Algorithm is known for its simplicity and real-time responsiveness. It allows robots to navigate dynamic environments and adapt their paths based on changing obstacles.
In autonomous harvesting platforms, the Potential Fields Algorithm can be utilized to plan efficient paths for robots to navigate through agricultural fields or orchards. The algorithm enables the robots to avoid obstacles such as trees or plants while moving towards the harvesting targets, ensuring smooth and efficient harvesting operations.
Rapidly Exploring Random Tree (RRT) algorithm:
The Rapidly Exploring Random Tree (RRT) algorithm is widely used in robotics for path planning and exploration tasks. It is particularly suitable for scenarios where the environment is unknown or complex, and the robot needs to explore and find a feasible path.
The RRT algorithm works by incrementally growing a tree structure in the robot’s configuration space. It starts with an initial configuration as the tree’s root and then iteratively expands the tree by randomly sampling new configurations and connecting them to the existing tree. This random sampling and connection process continues until a goal configuration is reached or sufficient iterations are performed.
The key idea behind the RRT algorithm is to explore the configuration space in a randomized manner, rapidly expanding the tree towards unexplored areas. This allows the algorithm to quickly generate feasible paths in complex and cluttered environments.
The RRT algorithm also incorporates a local planning mechanism to steer the robot toward the goal configuration during expansion. This ensures that the generated paths converge towards the desired goal while avoiding obstacles.
The RRT algorithm is known for efficiently exploring large and complex spaces, balancing exploration and exploitation well. It is particularly effective in scenarios where the environment is dynamic or the robot must navigate cluttered environments with many obstacles.
In robotic harvesting, the RRT algorithm can plan paths for autonomous harvesters to navigate through agricultural fields or orchards efficiently. By rapidly exploring the configuration space, the algorithm can generate feasible ways that avoid obstacles and efficiently reach the target harvesting locations.
Practical Applications: Real-World Examples of Path Planning and Navigation in Autonomous Harvesting
Several real-world examples exist where path planning and navigation algorithms have been successfully applied in autonomous harvesting platforms. Here are a few examples:
A Technology company developed a robotic weeding system that uses computer vision and path-planning algorithms to identify and precisely spray herbicides on individual weeds. The system can differentiate between crops and weeds in real-time, allowing targeted and efficient weed control.
The representation below shows the weed detection accuracy and herbicide savings by using the robotic weeding system:
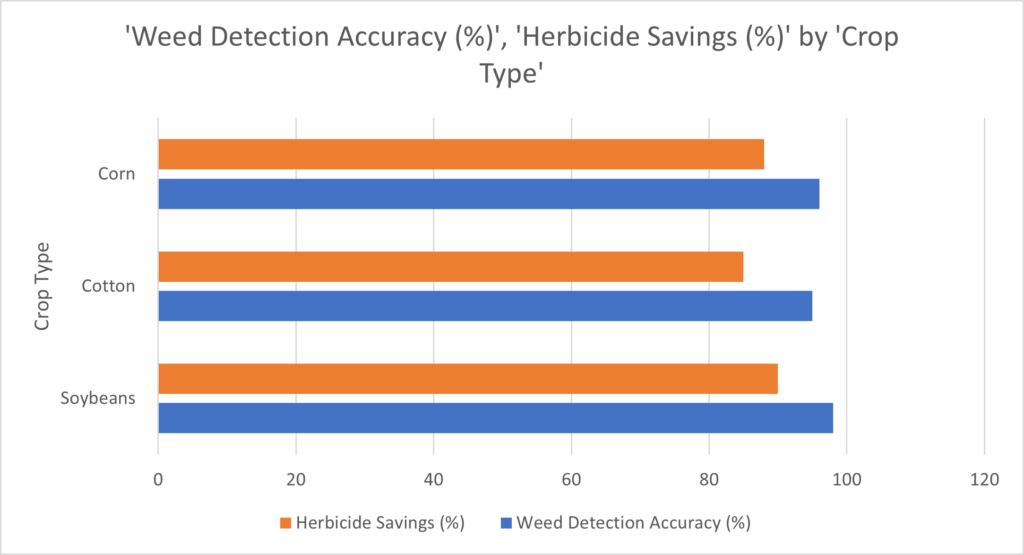
An Automation company has developed robots that can navigate greenhouse environments and autonomously move potted plants. The robots use path planning algorithms to optimize their movement, avoiding obstacles and maximizing the efficiency of plant transportation.
Another Technology company has developed software solutions for robotic applications, including autonomous harvesting. Their algorithms enable robots to perform complex tasks such as fruit picking in orchards, utilizing advanced path planning and navigation techniques.
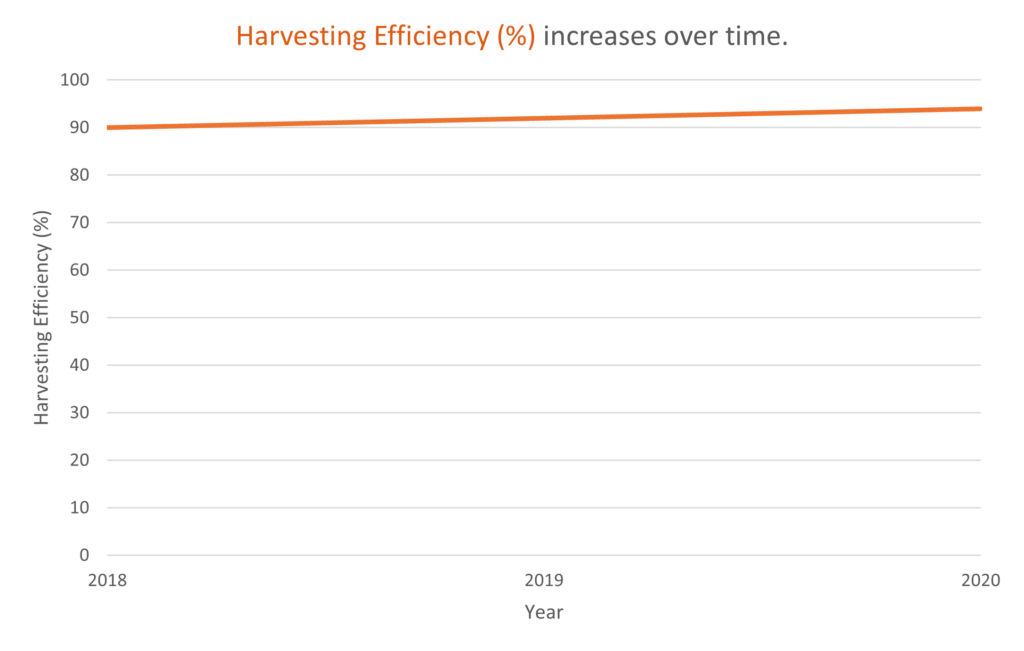
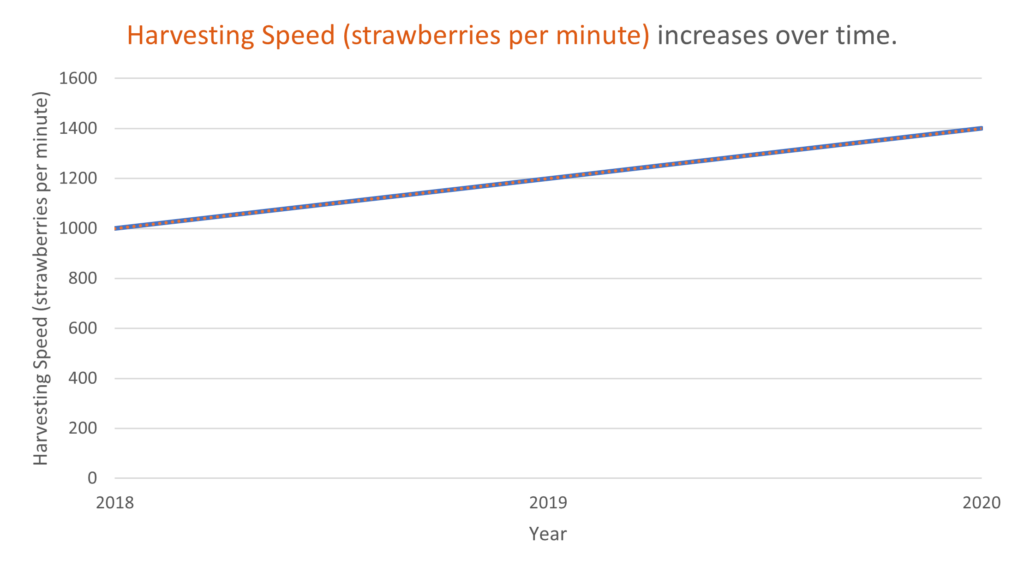
An agricultural company has developed a strawberry harvesting robot. The robot uses computer vision algorithms to identify ripe strawberries and path planning algorithms to navigate the strawberry field and pick the fruits. It can operate autonomously, improving the efficiency and accuracy of strawberry harvesting.
These real-world examples demonstrate the practical application of path planning and navigation algorithms in autonomous harvesting systems. By leveraging these algorithms, farmers can benefit from increased efficiency, improved crop quality, and reduced labor costs in the harvesting process.
Advantages and Future Prospects: How Path Planning Algorithms are Transforming the Landscape of Autonomous Harvesting
Path planning and navigation algorithms, such as A*, Dijkstra’s algorithm, Potential Fields, and Rapidly Exploring Random Trees (RRT), in robotic systems offer several advantages in various applications, including autonomous harvesting.
Here are some key benefits of using these algorithms:
- Efficiency: Path planning algorithms can quickly generate optimal or near-optimal paths for robots to navigate from a starting point to a target location. These algorithms consider distance, obstacles, and terrain to find the most efficient routes, saving time and energy.
- Adaptability: These algorithms can adapt to dynamic environments by recalculating real-time paths. As the climate changes, the algorithms can update the planned ways to account for new obstacles, optimize routes, and ensure safe navigation.
- Avoidance of obstacles: Path planning algorithms excel at avoiding obstacles in the robot’s environment. By considering obstacle positions and characteristics, the algorithms can generate paths that circumvent barriers, ensuring collision-free navigation.
- Global and local planning: Algorithms like A* and Dijkstra’s algorithm can perform international planning, considering the entire environment, to find the shortest or optimal paths. On the other hand, algorithms like Potential Fields and RRT focus on local planning, adapting to immediate surroundings, and avoiding local obstacles.
- Robustness: These algorithms are designed to handle complex and uncertain environments. They can control noise, uncertainty in sensor measurements, and dynamic obstacles, making them reliable and robust for various robotic applications.
- Scalability: Path planning and navigation algorithms can scale well to large environments, accommodating numerous obstacles and complex terrains. They can efficiently plan paths for robots in vast agricultural fields or orchards, optimizing harvest time and coverage.
- Real-time performance: These algorithms can generate paths and make real-time navigation decisions, ensuring fast and responsive robot behavior. Real-time path planning is crucial in time-sensitive tasks like autonomous harvesting, where efficiency and accuracy are paramount.
By leveraging these path planning and navigation algorithms, robotic systems in autonomous harvesting can achieve precise and efficient navigation, leading to increased productivity, reduced labor costs, and improved crop yields.
Revolutionizing Harvesting Practices: Contrasting Path Planning and Navigation Algorithms with Traditional Methods
Path planning and navigation algorithms used in robotic systems for autonomous harvesting differ from traditional methods in several ways:
- Precision and Accuracy: Traditional harvesting methods often rely on human laborers, who may need more precision and accuracy. Robots guided by path planning and navigation algorithms can perform exact and accurate tasks, ensuring consistent and optimal harvesting.
- Efficiency and Speed: Robotic systems equipped with these algorithms can perform harvesting tasks more efficiently and faster than manual labor. The algorithms enable robots to plan the most efficient paths, avoid obstacles, and navigate the field without wasting time or energy.
- Continuous Operation: Unlike human laborers who require rest breaks and have limited working hours, autonomous robots can operate continuously, maximizing productivity and reducing downtime. They can work day and night, ensuring a more efficient and timely harvest.
- Scalability: Path planning algorithms can handle large-scale agricultural fields and orchards, accommodating numerous crops and complex terrains. This scalability allows robots to cover a larger area in a shorter time, increasing the overall efficiency of the harvesting process.
- Consistency and Standardization: Robotic systems offer consistent and standardized harvesting practices. The algorithms ensure that the robots follow predefined paths and consistently perform tasks, reducing variations and errors that can occur with human laborers.
- Reduction in Labor Costs: By replacing or complementing human labor with robotic systems, there is a potential for significant cost savings in labor expenses. Robots can work autonomously and require minimal supervision, reducing the need for a large workforce.
- Safety: Harvesting robots can operate in hazardous or challenging environments without putting human laborers at risk. The security of the employees and the crops is ensured by their ability to maneuver through rocky terrain, carry big loads, and work in bad weather.
While traditional harvesting methods rely on human labor and manual processes, integrating path planning and navigation algorithms in autonomous harvesting systems brings increased efficiency, accuracy, scalability, and safety to the agricultural industry. These advancements can potentially revolutionize crop production, improving productivity and sustainability.
Conclusion:
In conclusion, using path planning and navigation algorithms in autonomous harvesting systems has brought significant advancements to the agricultural industry. These algorithms enable robotic platforms to perform harvesting tasks with precision, accuracy, efficiency, and scalability, surpassing the limitations of traditional methods. The robots guided by these algorithms can navigate through fields, avoiding obstacles and planning the most optimal paths for harvesting. They can operate continuously, ensuring consistent and standardized practices while reducing labor costs and improving overall productivity. Moreover, integrating these algorithms enhances safety by allowing robots to work in hazardous environments without endangering human laborers. The advancements in autonomous harvesting technology offer great potential for increasing efficiency, reducing labor requirements, and optimizing crop yield. As technology continues to evolve, it holds promise for revolutionizing the agricultural sector and contributing to sustainable and efficient food production. However, further research and development are needed to overcome challenges such as handling delicate crops and adapting to varying field conditions. Nonetheless, the future of autonomous harvesting looks promising, offering a transformative solution to meet the growing demand for efficient and accurate agricultural practices.


